

انواع اصلی موتورهای برق AC و DC و تفاوتهای آنها
موتورهای الکتریکی، قلب تپنده بسیاری از ماشینآلات و دستگاههای مدرن هستند. آنها انرژی الکتریکی را به انرژی مکانیکی تبدیل میکنند و نقش حیاتی در صنایع، حمل و نقل، لوازم خانگی و بسیاری دیگر از جنبههای زندگی ما ایفا میکنند. به طور کلی، موتورهای الکتریکی به دو دسته اصلی تقسیم میشوند: موتورهای جریان متناوب (AC) و موتورهای جریان مستقیم (DC). هر کدام از این دستهها دارای انواع مختلفی هستند که بر اساس اصول عملکرد، ساختار و کاربردهایشان متمایز میشوند. در این مقاله، به بررسی انواع اصلی موتورهای AC و DC و همچنین تفاوتهای کلیدی میان آنها خواهیم پرداخت.
مقدمه:
نیاز به حرکت و انجام کار، همواره محرک اختراعات و نوآوریهای بشر بوده است. با کشف الکتریسیته و درک ارتباط آن با مغناطیس، ایده تبدیل انرژی الکتریکی به انرژی مکانیکی شکل گرفت. موتورهای DC، به عنوان اولین نوع موتورهای الکتریکی عملی، راه را برای توسعه فناوریهای بعدی هموار کردند. با پیشرفت در تولید و انتقال جریان متناوب (AC)، موتورهای AC نیز به تدریج جایگاه خود را در صنایع مختلف پیدا کردند. امروزه، انتخاب بین موتور AC و DC به عوامل متعددی بستگی دارد که در ادامه به آنها خواهیم پرداخت.
انواع اصلی موتورهای برق AC:
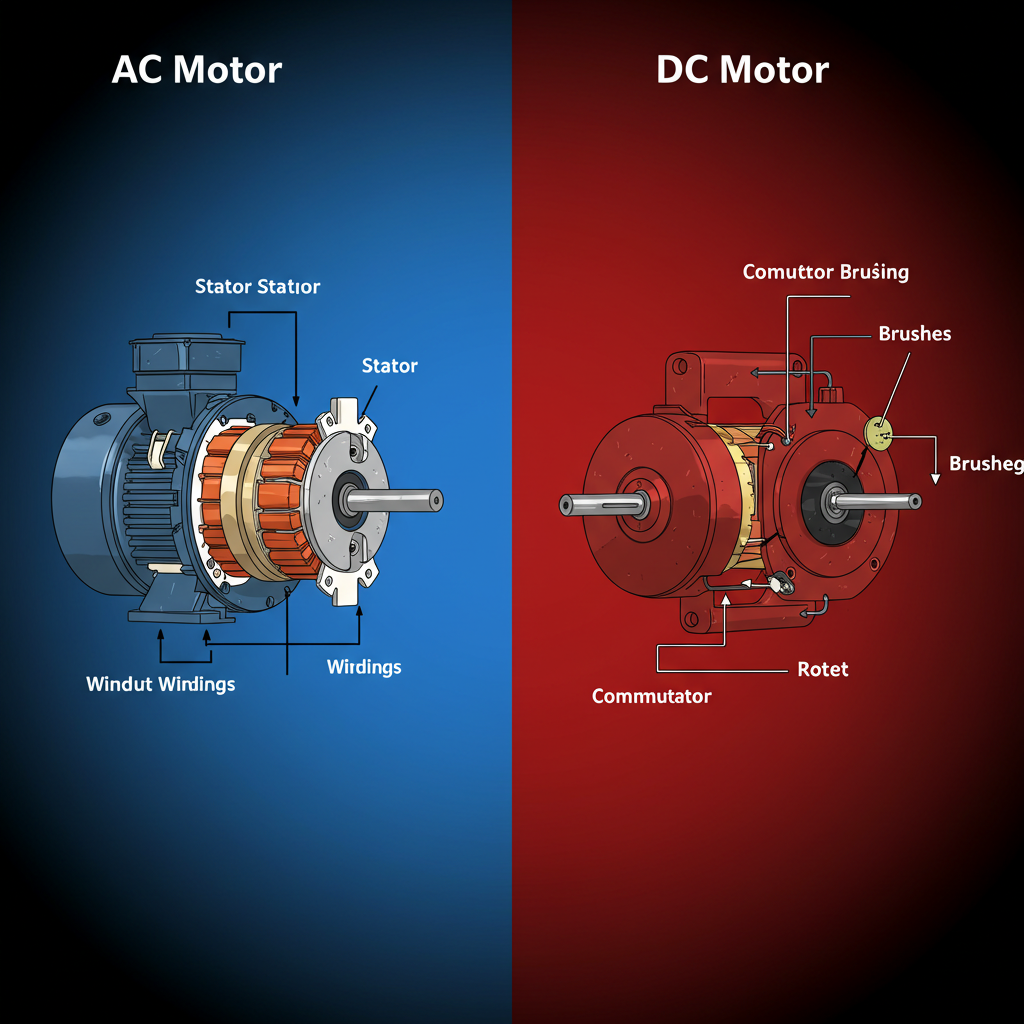
موتورهای AC از جریان متناوب برای تولید میدان مغناطیسی دوار و ایجاد گشتاور استفاده میکنند. دو نوع اصلی از موتورهای AC عبارتند از:
-
موتورهای القایی (Induction Motors): این نوع موتورها، که به آنها موتورهای آسنکرون نیز گفته میشود، رایجترین نوع موتور AC به شمار میروند. اصل کار آنها بر اساس القای الکترومغناطیسی بین استاتور (بخش ثابت) و روتور (بخش متحرک) است. موتورهای القایی به دو دسته اصلی تقسیم میشوند:
- موتورهای القایی قفس سنجابی (Squirrel Cage Induction Motors): این موتورها دارای روتوری با ساختار ساده و میلههای هادی هستند که در دو انتها به حلقههای اتصال کوتاه متصل شدهاند. این ساختار شبیه به قفس سنجاب است و به همین دلیل این نام را گرفتهاند. موتورهای قفس سنجابی به دلیل ساختار مقاوم، هزینه پایین، نیاز به نگهداری کم و عملکرد قابل اعتماد، در طیف وسیعی از کاربردها از جمله پمپها، فنها، کمپرسورها و ماشینآلات صنعتی مورد استفاده قرار میگیرند.
- موتورهای القایی روتور سیمپیچی شده (Wound Rotor Induction Motors): در این نوع موتورها، روتور دارای سیمپیچیهایی است که از طریق حلقههای لغزان و جاروبکها به مدارهای خارجی متصل میشوند. این امکان را فراهم میکند تا مقاومت خارجی به مدار روتور اضافه شود و بدین ترتیب گشتاور اولیه موتور افزایش یافته و جریان راهاندازی کاهش یابد. این موتورها برای کاربردهایی با بار سنگین و نیاز به گشتاور اولیه بالا مانند جرثقیلها، بالابرها و آسیابها مناسب هستند.
-
موتورهای سنکرون (Synchronous Motors): در این نوع موتورها، سرعت چرخش روتور دقیقاً با فرکانس جریان AC سنکرون است. روتور این موتورها دارای آهنرباهای دائمی یا سیمپیچیهای تحریک DC است که با میدان مغناطیسی دوار استاتور همگام میشوند. موتورهای سنکرون برای کاربردهایی که نیاز به سرعت ثابت و دقیق دارند، مانند ژنراتورهای AC، برخی از ماشینآلات صنعتی با بار ثابت و سیستمهای کنترل موقعیت دقیق، ایدهآل هستند. همچنین، این موتورها میتوانند برای اصلاح ضریب توان در شبکههای الکتریکی نیز مورد استفاده قرار گیرند.
انواع اصلی موتورهای برق DC:
موتورهای DC از جریان مستقیم برای تولید میدان مغناطیسی و ایجاد گشتاور استفاده میکنند. انواع اصلی موتورهای DC عبارتند از:
-
موتورهای DC با جاروبک (Brushed DC Motors): این نوع موتورها از کموتاتور و جاروبکها برای تغییر جهت جریان در سیمپیچیهای روتور (آرمیچر) استفاده میکنند و بدین ترتیب میدان مغناطیسی روتور نسبت به میدان مغناطیسی استاتور در حال چرخش باقی میماند. موتورهای DC با جاروبک به سه دسته اصلی تقسیم میشوند:
- موتورهای DC سری (Series DC Motors): در این موتورها، سیمپیچیهای آرمیچر و میدان به صورت سری به یکدیگر متصل میشوند. این امر منجر به گشتاور اولیه بسیار بالا و سرعت متغیر میشود. با افزایش بار، سرعت به شدت کاهش مییابد. این موتورها برای کاربردهایی مانند استارت خودروها، بالابرهای سنگین و ابزارهای قدرتمند که نیاز به گشتاور اولیه قوی دارند، مناسب هستند.
- موتورهای DC شنت (Shunt DC Motors): در این موتورها، سیمپیچیهای آرمیچر و میدان به صورت موازی (شنت) به یکدیگر متصل میشوند. این ساختار منجر به سرعت نسبتاً ثابت و گشتاور متوسط میشود. تغییر بار تاثیر کمی بر سرعت دارد. این موتورها برای کاربردهایی مانند ژنراتورهای DC، ماشینآلات تراشکاری و دستگاههایی که نیاز به سرعت تقریباً ثابت دارند، مناسب هستند.
- موتورهای DC کمپوند (Compound DC Motors): این موتورها ترکیبی از سیمپیچیهای سری و شنت را دارند. با تنظیم نسبت سیمپیچیهای سری و شنت، میتوان ویژگیهای گشتاور و سرعت مورد نظر را به دست آورد. این موتورها برای کاربردهایی که نیاز به گشتاور اولیه بالا و تنظیم سرعت نسبتاً خوب دارند، مانند آسانسورها و پرسها، مناسب هستند.
-
موتورهای DC بدون جاروبک (Brushless DC Motors – BLDC): این نوع موتورها از آهنرباهای دائمی در روتور و سیمپیچی در استاتور استفاده میکنند. برخلاف موتورهای DC با جاروبک، در موتورهای BLDC از قطعات الکترونیکی (مانند انکودر و درایور) برای تعیین موقعیت روتور و تغییر جهت جریان در سیمپیچیهای استاتور استفاده میشود. حذف جاروبکها منجر به مزایایی همچون عمر طولانیتر، راندمان بالاتر، صدای کمتر، و نیاز به نگهداری کمتر میشود. موتورهای BLDC در کاربردهای متنوعی از جمله رباتیک، پهپادها، هارد دیسکها، فنهای خنککننده پیشرفته و لوازم خانگی مدرن مورد استفاده قرار میگیرند.
تفاوتهای کلیدی بین موتورهای AC و DC:
درک تفاوتهای اساسی بین موتورهای AC و DC برای انتخاب مناسبترین موتور برای یک کاربرد خاص ضروری است. در جدول زیر به برخی از مهمترین تفاوتهای آنها اشاره شده است:
| ویژگی | موتور AC | موتور DC |
| نوع جریان | برای عملکرد به جریان متناوب (AC) نیاز دارد | برای عملکرد به جریان مستقیم (DC) نیاز دارد |
| ساختار | معمولاً ساختار سادهتری دارد، به ویژه در موتورهای القایی که فاقد کموتاتور و جاروبک هستند | معمولاً ساختار پیچیدهتری دارد، به ویژه در موتورهای جاروبکدار که دارای کموتاتور و جاروبک هستند؛ موتورهای بدون جاروبک دارای مدارهای الکترونیکی پیچیدهتری هستند |
| کنترل سرعت | کنترل سرعت معمولاً با تغییر فرکانس و ولتاژ انجام میشود که میتواند پیچیدهتر باشد | کنترل سرعت معمولاً با تغییر ولتاژ اعمال شده به موتور انجام میشود که در موتورهای جاروبکدار سادهتر است |
| گشتاور اولیه | گشتاور اولیه در انواع مختلف متفاوت است؛ موتورهای القایی قفس سنجابی گشتاور اولیه متوسطی دارند | موتورهای DC سری و بدون جاروبک معمولاً گشتاور اولیه بالایی دارند |
| راندمان | معمولاً راندمان بالاتری در مقایسه با موتورهای DC جاروبکدار دارند، به ویژه موتورهای القایی و سنکرون | راندمان میتواند متغیر باشد؛ موتورهای DC بدون جاروبک راندمان بالاتری نسبت به موتورهای جاروبکدار دارند |
| نگهداری | نیاز به نگهداری کمتری دارند، به ویژه موتورهای القایی که فاقد جاروبک هستند | موتورهای DC جاروبکدار به دلیل وجود جاروبکها و کموتاتور نیاز به نگهداری بیشتری دارند |
| هزینه | موتورهای القایی قفس سنجابی معمولاً هزینه اولیه پایینتری دارند | موتورهای DC بدون جاروبک معمولاً هزینه اولیه بالاتری دارند |
| منابع تغذیه | به طور مستقیم از شبکه برق AC قابل تغذیه هستند | برای تغذیه نیاز به منبع DC یا یکسو کننده دارند |
| کاربردها | کاربردهای گسترده در صنعت، لوازم خانگی، پمپها، فنها، کمپرسورها و غیره | کاربردها در خودروها (موتورهای استارتر و برف پاک کن)، اسباببازیها، رباتیک، لوازم خانگی قابل حمل و غیره |
نتیجهگیری:
موتورهای AC و DC هر کدام دارای ویژگیها، مزایا و معایب خاص خود هستند و برای کاربردهای متفاوتی مناسب میباشند. موتورهای AC، به ویژه نوع القایی، به دلیل سادگی ساختار، هزینه پایین و نیاز به نگهداری کم، به طور گسترده در صنایع و کاربردهای عمومی مورد استفاده قرار میگیرند. موتورهای DC، به ویژه نوع بدون جاروبک، به دلیل راندمان بالا، عمر طولانی و قابلیت کنترل دقیق، در کاربردهای پیشرفته و حساس رو به افزایش هستند. انتخاب نوع مناسب موتور بستگی به نیازهای خاص هر کاربرد، از جمله نوع منبع تغذیه موجود، گشتاور و سرعت مورد نیاز، ملاحظات مربوط به هزینه و نگهداری، و شرایط محیطی دارد. با درک عمیق از انواع مختلف موتورهای AC و DC و تفاوتهای آنها، مهندسان و طراحان میتوانند بهترین گزینه را برای دستیابی به عملکرد مطلوب در سیستمهای خود انتخاب کنند.
